Der zunehmende innerstädtische Verkehr führt zu Umweltbelastungen (Lärm, Abgase), hohen Reisezeiten und erhöhtem Treibstoffverbrauch für die Verkehrsteilnehmer. Eine stärkere Nutzung des ÖPNV ist zwar sehr sinnvoll, vielerorts aber durch das eingeschränkte Angebot noch keine Alternative zum motorisierten Individualverkehr (MIV). Das gilt insbesondere für Pendlerverkehre in Stadt-/Land-Raumbeziehungen.
Auch ist der Ausbau der Verkehrswege teuer, benötigt Flächen (die an vielen Stellen z.B. innerorts wegen der vorliegenden Bebauung nicht vorhanden sind) und ist i.d.R. durch ein langes Genehmigungsverfahren gekennzeichnet. Eine weitere Möglichkeit dieser Situation zu begegnen, stellt die effizientere Nutzung der vorhandenen Straßen durch eine bessere Koordination des Verkehrs dar.
Hier setzen wir mit datenbasierten Verfahren zur Verkehrsoptimierung an. Die hier aufgeführten Arbeiten haben zu dem Projekt KI4LSA ( Künstliche Intelligenz für LichtSignalAnlagen) geführt.
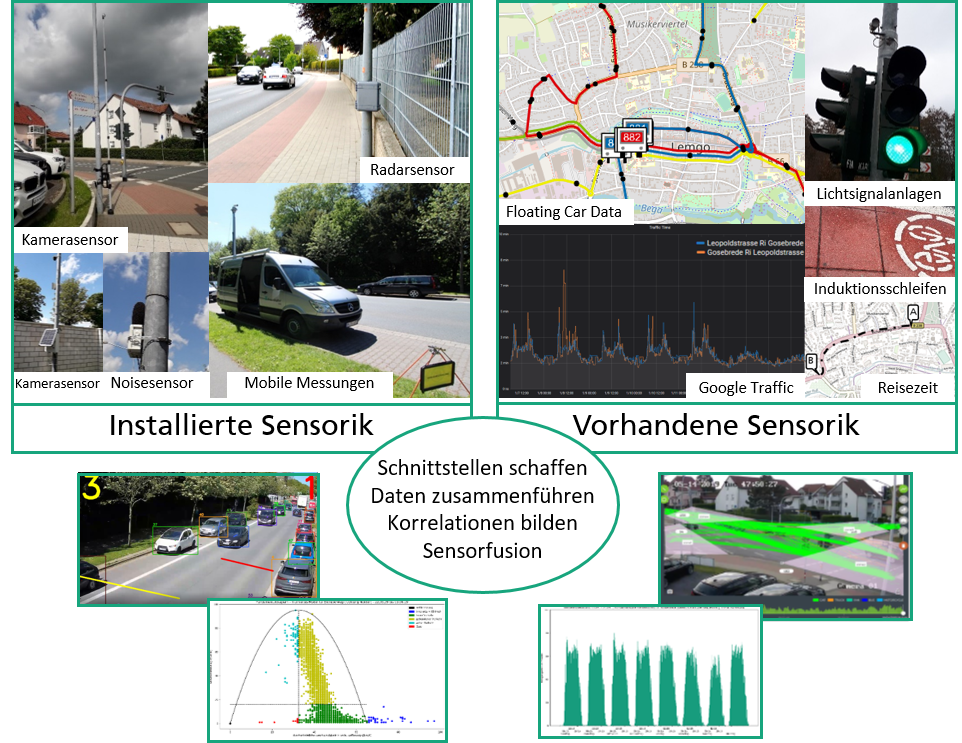
Verkehrserfassung mit Radarsensoren
Am Beispiel installierter Radarsensoren werden die Geschwindigkeit und Bewegungsrichtung von Fahrzeugen detektiert und diese klassifiziert (Car, Truck). Die Daten werden in Echtzeit in Dashboards angezeigt oder stehen für Echtzeitanwendungen (Optimierung, Diagnose) oder Analyseanwendungen als historische Daten zur Verfügung.
Verkehrserfassung mit videobasierter Sensorik
Fraunhofer setzt videobasierte Sensorik für die anonymisierte Fahrzeugerfassung ein. Die Klassifizierung und die Qualität der Verkehrserfassung ist abhängig von der Leistungsfähigkeit der anschließenden Bildauswertung (Algorithmen zur Mustererkennung, Maschinelles Lernen z.B. mit neuronalen Netzen) und dem Sensor (z.B. Infrarot). Echtzeitdaten werden von videobasierten Sensoren mit unserer IoT-Box in Lemgo ausgewertet. Dabei wird die Bildauswertung mit Algorithmen der Open-Source Programmbibliothek "OpenCV" durchgeführt. Bilder werden nicht gespeichert und anonymisierte Messwerte (z.B. Anzahl von Fahrzeugen pro Fahrtrichtung) übertragen.
Verkehrserfassung mit Floating Car Data
Mit Floating Car Data (FCD) wird die Nutzung von Fahrzeugen als Sensor zur Detektion des Verkehrsflusses unter Verwendung der GPS-Position bezeichnet. Eine Folge der Digitalisierung ist unter anderem die immer größere Verfügbarkeit von Mobilitätsdaten von z.B. Smartphones. So kann über Dienste, wie z.B. Google, die aktuelle Reisezeitdauer von bestimmten Streckenabschnitten bezogen werden. Die Daten stützen sich unter anderem auf Daten von Android-Geräten oder Navigationssystemen, die als Sensor im Fahrzeug fungieren. Das Abrufen der Information ist in der Regel kostenpflichtig und die Preisstruktur richtet sich nach der Anfragehäufigkeit. Die Google Traffic Daten wurden beispielsweise in 15-Minuten-Intervallen zyklisch abgefragt.
Fahrzeugflotten, wie zum Beispiel Fahrzeuge des Öffentlichen Personennahverkehrs (ÖPNV) können ebenfalls verwendet werden, um die Fahrtdauer für bestimmte Streckenabschnitte abzubilden. Anhand von Echtzeitinformationen über Verspätung und Position der Busse können die Bewegungsgeschwindigkeiten und zurückgelegten Strecken ermitteln werden. In den Berechnungen müssen dann Stopps an Haltestellen entsprechend herausgerechnet werden. Generell gilt aber: Fährt der Bus mit verringerter Geschwindigkeit, so ist auf ein hohes Verkehrsaufkommen oder auf einen Stau zu schließen. Die Nutzung und Darstellung der Echtzeitdaten des Stadtbus in Lemgo für Verkehrsinformationen wurde im Projekt "Lemgo Digital" umgesetzt.
Verkehrserfassung mit videobasierter Szenenanalyse
Das Fraunhofer IOSB-INA führte Mitte 2019 in Lemgo im Bereich Gosebrede, Rintelner-, Konsul-Wolff- und Herforder Strasse mit einem Spezialfahrzeug Techniktests und Verkehrsmessungen zur Vorbereitung eines Forschungsprojektes durch. Hierdurch werden Trainingsdaten für neue KI-basierte Algorithmen für die zuverlässige Objekterkennung und -klassifikation generiert.


KI-basierte Verkehrsflussoptimierung
In dem nachfolgenden Video ist die Modellierung eines Teilausschnitts des obigen Verkehrsbereichs mit dem zeitlichen Verlauf der mittleren Reisezeit unter Nutzung des Simulations-Frameworks SUMO (Simulation of Urban MObility) zu sehen. Es ist deutlich erkennbar, dass bereits durch Anwendung einer linearen Optimierung die Reisezeit und damit der Verkehrfluss deutlich verbessert werden können.